Projects

Autonomous Untethered Micro Soft Robots
This project tackles the prevailing limitations in microrobotics, specifically the lack of autonomy and the reliance on external tethers. Our objective is to develop autonomous untethered micro soft robots by ingeniously integrating state-of-the-art soft actuators and mechanisms — capable of precise control and powered by compact onboard electronics and power sources. The project also focuses on the strategic incorporation of miniaturized sensors and the implementation of resource-efficient SLAM algorithms, all within a robust and innovative robotic framework. This initiative represents a significant leap forward in the field, aiming to enhance the operational independence and versatility of microrobots.
Meter-scale Tensegrity Robots
Our lab is developing a modular three-bar tensegrity robot designed for extreme deformability, robustness, and adaptability. Unlike traditional designs, this robot uses a novel Quasi-Direct Drive (QDD) cable actuator with low-stretch polymer cables, enabling high-accuracy proprioception (cable length estimation error <1% relative to bar length) without external sensors. The actuators also provide on-the-fly stiffness tuning, achieving stiffness variations up to 7× the baseline, which allows the robot to adapt to different payloads and environments. This modular platform supports customizable payload integration, precise control, and versatile morphing behaviors. Demonstrations highlight its ability to combine shape change with stiffness adaptation for real-world tasks. Looking ahead, we are extending this work toward autonomous operation and open-source module design to accelerate tensegrity robotics research. 📄 Read more in our RA-L paper Design of a Variable Stiffness Quasi-Direct Drive Cable-Actuated Tensegrity Robot .
State Estimation and Perception for Soft Robots
Soft robots present unique challenges for perception and control due to their continuously deforming bodies and complex interactions with the environment. Our research develops proprioceptive, tactile, and learning-based perception systems that enable soft robots to estimate their shape, pose, and contact states in real time.
We combine geometric modeling, visuotactile sensing, graph neural networks, and contact-aided state estimation to provide soft robots with an accurate understanding of both their body configuration and environmental interactions. These capabilities form a critical foundation for autonomous locomotion, navigation, and manipulation in unstructured environments.
For more details, please read:
Tensegrity Robot Proprioceptive State Estimation With Geometric Constraints, IEEE RAL, 2025 .
Symmetry-Aware Heterogeneous Graph Neural Network for Contact State Estimation in Tensegrity Robots, IEEE RoboSoft, 2025 .
A Scalable Open-Source Visuotactile Sensing System for Contact-Aware Proprioception and State Estimation in Tensegrity Robots, IEEE/RSJ IROS 2026 .
Autonomous Wall Climbing Soft Robot
SPARC is a soft climbing robot designed for precise navigation across horizontal and vertical surfaces. It integrates three parallel 3D-printed Kresling origami actuators with suction cups, enabling large 3D actuation and adaptive adhesion. By exploiting the contraction–twisting coupling of Kresling structures, SPARC achieves real-time proprioception through inverse kinematics modeling. A dual closed-loop control system with efficient online path planning allows accurate trajectory following—achieving 0.5% error on flat terrain and 3% on vertical climbs, while carrying payloads over twice its weight. Multiple SPARC modules can also link for seamless ground-to-wall transitions. This integration of soft actuation, proprioceptive sensing, and online planning makes SPARC a unique platform for 3D exploration and inspection. Future work focuses on onboard sensing for state estimation, SLAM, and autonomy. 📄 Read more in our Advanced Science paper: SPARC: A Soft, Proprioceptive, Agile Robot for 3D Exploration.
Soft Robotic Face Mask (Sponsor: Kahn Grand Challenge)
Rescue breathing for children using face masks is difficult due to large variation in facial size and structure with age. This project seeks to develop a soft robotic face mask that can adjust its shape and size to match that of the patient. The design uses soft materials that can change their stiffness, allowing the mask to conform and seal effectively to the face in a hands-free manner. The project includes design and prototyping of these masks as well as adult testing, in preparation for future work with children. For more details, check out our RoboSoft Best Student Paper Award Finalist Adaptive Self-Sealing Soft Robotic Face Mask (SRFM) with Particle Jamming. .
Collaborator: Prof. Mark Draelos & Prof. Brent Gillespie

Autonomous Impact Resistant Tensegrity Robots
Tensegrity robots, distinguished by their composition of rigid struts and flexible tendons, are emerging as ideal candidates for space exploration thanks to their exceptional resilience against harsh impacts. Despite their potential, challenges such as low speed, limited maneuverability in unstructured terrains, inadequate onboard sensing, and a significant simulation-to-reality gap have limited their practical application. Our project is focused on overcoming these challenges by developing a fully autonomous tensegrity robot. This robot will feature advanced maneuverability and enhanced impact resistance, tailored for extreme environments. Our approach includes the implementation of a modular mechanical and electrical design, complemented by a distributed SLAM system operating onboard. This system is further bolstered by a computationally efficient physics engine, ensuring the robot's adeptness in navigating and adapting to complex terrains.
Collaborator: Prof. Rebecca Kramer-Bottiglio (Yale University) & Prof. Will Johnson (Swarthmore College)

Untethered Reconfigurable Soft Robots (URSoRo) with Multimodal Locomotion for Amphibious Unstructured Environments by Soft Electromagnetic Actuator (Sponsor: NSF)
This project aims to develop a new class of untethered, reconfigurable, and multimodal amphibious soft robots (URSoRo), enhanced by a machine learning (ML) design tool. These robots will utilize innovative soft bistable electromagnetic (EM) actuators, allowing them to rapidly adapt and reconfigure to navigate complex and challenging environments. By harnessing the reconfigurability and morphability of soft robots, this project seeks to advance their environmental adaptability and promote practical applications, including search and rescue missions, monitoring of wildlife and vegetation, and infrastructure inspections in extreme environments.
Collaborator: Prof. M. Khalid Jawed (UCLA)
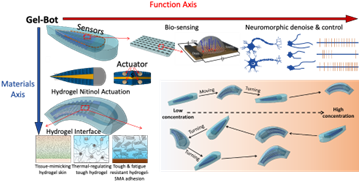
Chemotaxis-Driven Neuromorphic Amoeboid Hydrogel Microrobot (GEL-Bot) (Sponsor: NSF)
GEL-Bot is a biocompatible micro-scale soft robot designed to mimic the morpho-functional intelligence of amoebas by directly linking chemical sensing to actuation. The robot integrates hydrogel structures with MXene nanomaterials and micro nitinol actuators to achieve multimodal sensing, adaptive control, and thermal actuation in a compact platform. Its hydrogel–MXene skin detects electrochemical changes in the surrounding environment, while a 3D thermally activated hydrogel–nitinol motor enables swimming and crawling at the microscale. Engineered hydrogel interfaces improve thermal transport and reduce interfacial friction for efficient motion, and MXene–hydrogel memristors provide neuromorphic learning and closed-loop sensorimotor control.
Scientifically, the project explores three core directions: understanding coupled transport and electrochemical sensing in hydrogel–MXene films, designing slip-free and high-performance hydrogel–nitinol composite actuators, and probing the memristive mechanisms of MXene–hydrogel electrodes for integrated neuromorphic control. Together, these advances aim to create an intelligent, agile, and biocompatible soft microrobot capable of invasive biomedical probing and confined-space inspection, setting the stage for next-generation microscale machines that can sense, adapt, and learn in unstructured environments.
Collaborator: Prof. Chenglin Wu (Texas A&M) & Prof. Shaoting Lin (MSU)
Autonomous Plant Climbing Microrobots for Early Pest Detection (Sponsor: USDA).
This project aims to develop autonomous robotic systems that can navigate directly within complex plant canopies to enable precision crop monitoring and early pest detection. While existing agricultural robots primarily operate above crops or on the ground, many critical indicators of plant health—including pests, diseases, and structural abnormalities—are located on stems, branches, and the undersides of leaves, making them difficult to access.
Our research combines novel climbing robot designs with onboard perception, mapping, planning, and AI-based decision-making to create robots capable of operating in dense and highly unstructured agricultural environments. By bringing robotic sensing directly to the source of potential problems, we seek to reduce labor requirements, improve crop health monitoring, and advance sustainable and scalable agricultural practices.
For more details, refer to the robot website STEMBot .
Collaborator: Prof. Dmitry Berenson & Zachary Charlick

Autonomous Pipeline Inspection Robot
This project aims to develop autonomous soft robotic systems capable of inspecting and monitoring complex pipeline networks that are inaccessible to conventional robots. Aging infrastructure in water, energy, and industrial systems requires frequent inspection to detect defects before they lead to costly failures, yet many pipelines contain sharp bends, junctions, and diameter variations that challenge traditional rigid robotic platforms. Our research focuses on combining soft actuation, embedded sensing, onboard intelligence, and autonomous navigation to create robots that can safely traverse confined and unstructured pipeline environments. By leveraging bio-inspired locomotion and proprioceptive perception, these robots can adapt to complex geometries while continuously reconstructing their surroundings and monitoring infrastructure health. Through advances in soft robotics, perception, and autonomy, this project seeks to enable scalable, low-cost inspection of critical infrastructure, improving reliability, reducing maintenance costs, and enhancing public safety. For more details, check out our paper featured on npj Robotics SPPIRO: a Soft, Power-autonomous, Proprioceptive In-pipe Robot for adaptive inspection in complex pipeline environments. .

Robust 3D Perception for Embodied AI
Understanding the three-dimensional world from visual observations is fundamental to robotics, autonomous driving, and embodied AI. However, real-world environments often contain ambiguous or deceptive visual cues, such as transparent surfaces, optical illusions, reflections, and occlusions, that challenge existing vision systems.
Our research develops foundation-model-based perception algorithms that enable robots to reason reliably under geometric ambiguity and perceptual uncertainty. We study how modern vision models represent multiple valid geometric hypotheses, identify failure modes that lead to 3D hallucinations, and develop benchmarks, evaluation protocols, and learning algorithms to improve the robustness and interpretability of 3D perception. By advancing trustworthy scene understanding, our goal is to enable AI systems that perceive the physical world more reliably in complex real-world environments.
For more details, please read:
One Scene, Two Depths: Probing Geometric Ambiguity in Monocular Foundation Models, ECCV 2026. .
The 3D Mirage: Probing and Taming Monocular 3D Hallucinations, ECCV 2026. .
SLAM and Sensor Deployment for Soft Robots
Soft robots present a unique challenge for Simultaneous Localization and Mapping (SLAM) due to their transformative nature and distinctive locomotion. Traditional SLAM algorithms, designed with rigid robot frames in mind, fall short when applied to the dynamic framework of soft robots. Our project is at the forefront of overcoming this obstacle. We aim to innovate by redesigning the SLAM architecture specifically for soft robots. This involves optimizing sensor deployment within synthetic environments prior to actual implementation, thus paving the way for effective SLAM application in the ever-evolving domain of soft robotics.
Adaptive Grasping with Soft Grippers.
Details will be released soon.

Modular Soft Robotic Arm.
Details will be released soon.
(Archived) Autonomous Soft Lighter-Than-Air (LTA) Vehicle (Sponsor: ONR)
This project is centered on the development of a soft LTA vehicle equipped with advanced onboard perception, localization, and path planning capabilities. Our goal is to compete in the semiannual Inter-University Defend The Republic (DTR) competition, organized by the Office of Naval Research. The project is structured into three specialized teams: hardware, control, and perception. We are actively seeking talented students to join our efforts. Additionally, we are pioneering novel soft robotic propulsion mechanisms specifically designed for LTA vehicles.